


Дослідники з Університету Коїмбри (Португалія) розробили нову м’яку роботизовану руку. Вона проста у виготовленні та легко масштабується. Розробка поєднує м’яке покриття з твердим екзоскелетом. Саме так влаштовані кінцівки тварин.
Про це розповідає Interesting Engineering.
Дослідники з Університету Коїмбри (Португалія) розробили нову м’яку роботизовану руку.
“Більшість роботів виготовляються з жорстких матеріалів, – говорить співавтор роботи Педро Нето. – Однак, спостерігаючи за тваринами, ми помічаємо, що їхні тіла складаються з твердих частин (скелетів) та м’яких (м’язів). Але є організми, наприклад, дощові черв’яки, які повністю складаються з м’яких тканин. Спираючись на досвід природи, ми припускаємо, що наступне покоління роботів буде включати компоненти з м’яких матеріалів, а в деяких випадках і повністю складатися з м’яких частин”.
У порівнянні з жорсткими роботами, м’які робототехнічні системи безпечніші для людей або тварин. Наприклад, при зіткненні такі роботи з меншою ймовірністю можуть завдати значної шкоди або травми.
Основною метою нещодавньої роботи Нето та його колег була розробка нової м’якої роботизованої руки, яка була б безпечною та доступною.
“Ми використовували метод кінцевих елементів для оптимізації конструкції перед фізичним виготовленням руки, що дозволило знизити витрати на створення прототипу”, – пояснив Нето. — “Використання звичайного 3D-друку виявилося ефективним завдяки прямому друку деяких компонентів з м’яких матеріалів та друку форм з жорстких матеріалів”.
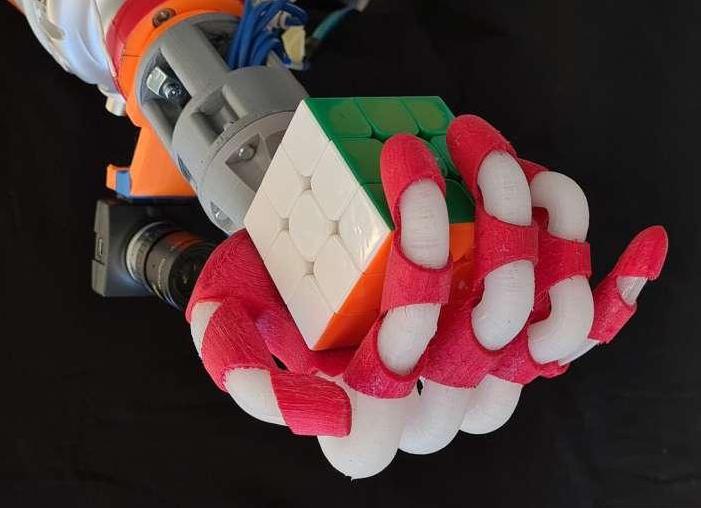
М’яка роботизована рука, створена Нето та його колегами, ґрунтується на кількох різних матеріалах. Її ретельно продумана структура прагне повторити зовнішній вигляд та функціональність людських рук.
“Конфігурація роботизованої руки складається з п’яти м’яких приводів, кожен з яких відповідає пальцю, та екзоскелета, що сприяє згинанню пальців”, — каже Нето. – “Контролер ON-OFF підтримує задані кути вигину пальців, що дозволяє руці ефективно захоплювати різні предмети”.
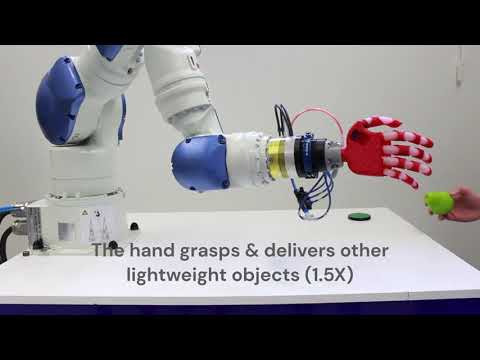
На даний момент дослідники оцінили роботу своєї роботизованої руки в ході низки симуляцій та експериментів. Перші результати дуже багатообіцяючі: рука може успішно захоплювати безліч об’єктів різної форми, ваги та розмірів.


У майбутньому м’яка роботизована рука може використовуватися як академічними групами, так і окремими робототехніками для тестування нових алгоритмів штучного інтелекту (ШІ) та інших обчислювальних інструментів, вкладених у розвиток здібностей роботів. Крім того, її конструкція може відкрити нові можливості для створення недорогих роботів-гуманоїдів, здатних допомагати людині у повсякденній діяльності.
Як розповідало раніше BitukMedia, біоінженери розробили роботизований шостий палець.